KUKA youBot Mobile Manipulation
Python, Robotic Manipulation, CoppeliaSim
Overview
Goal: Write a program that automatically plans a trajectory for a KUKA youBot mobile manipulator as it grasps a block and places it in a desired location.
GitHub: https://github.com/henryburon/mobile-manipulation
Process:
- I wrote three functions to complete this project, which, when combined, generate the final trajectory:
- TrajectoryGenerator
- FeedbackControl
- NextState
- TrajectoryGenerator
- Generates the reference trajectory for the end-effector frame {e}.
- Consists of eight concatenated trajectory segments:
- A trajectory to move the gripper from its initial configuration to a “standoff” configuration a few cm above the block.
- A trajectory to move the gripper down to the grasp position
- Closing of the gripper.
- A trajectory to move the gripper back up to the “standoff” configuration.
- A trajectory to move the gripper to a “standoff” configuration above the final configuration.
- A trajectory to move the gripper to the final configuration of the object.
- Opening of the gripper.
- A trajectory to move the gripper back to the “standoff” configuration.
- Output: A representation of the N configurations of the end-effector along the entire eight-segment reference trajectory.
- FeedbackControl
- Calculates the kinematic task-space feedforward plus feedback control law.

- Output: The commanded end-effector twist V expressed in the end-effector frame {e}.
- Calculates the kinematic task-space feedforward plus feedback control law.
- NextState
- Calculates the robot’s configuration at the next time-step using first-order Euler-step.
- Output: A 12-vector representing the configuration of the robot time Δt later.
- Combine Functions
- Finally, I integrated these three functions, provided the necessary initial and desired final configurations, and generated a .csv file to simulate the KUKA youBot’s movement in CoppeliaSim.
- Results
- I finished by generating three trajectories:
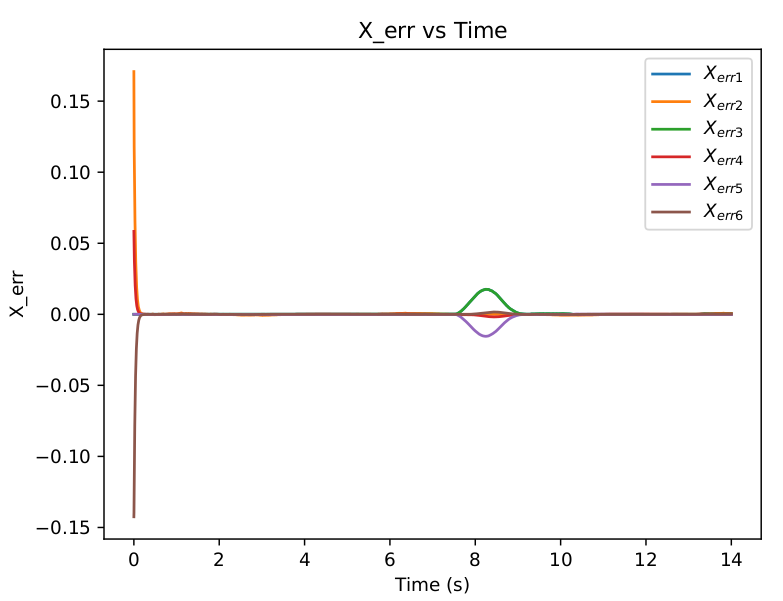
- Best: A well-tuned feedforward-plus-PI controller. Error quickly converged to zero. First clip in the YouTube video.
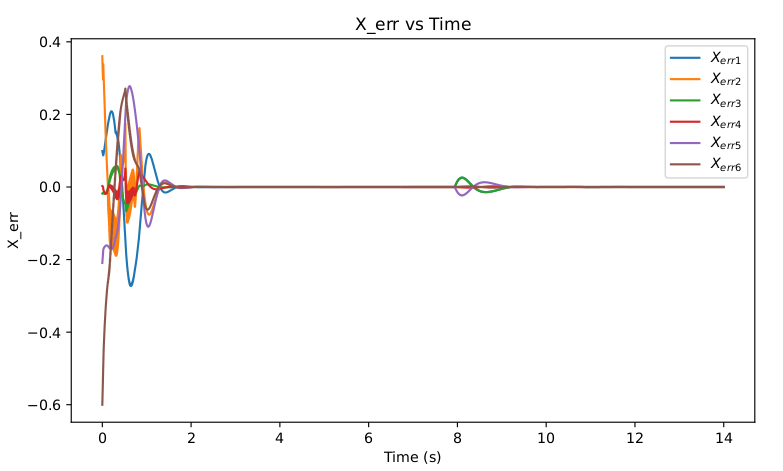
- Overshoot: A less-well-tuned feedforward-plus-PI controller. Error takes longer to converge to zero.
- newTask: Different initial and final configurations of the block. Second clip in the YouTube video.
- Best: A well-tuned feedforward-plus-PI controller. Error quickly converged to zero. First clip in the YouTube video.
- I finished by generating three trajectories: