Polyglotbot: A 7 DoF Robot Arm that Writes Translated Text and Speech
ROS2, Python, Motion Planning
Overview
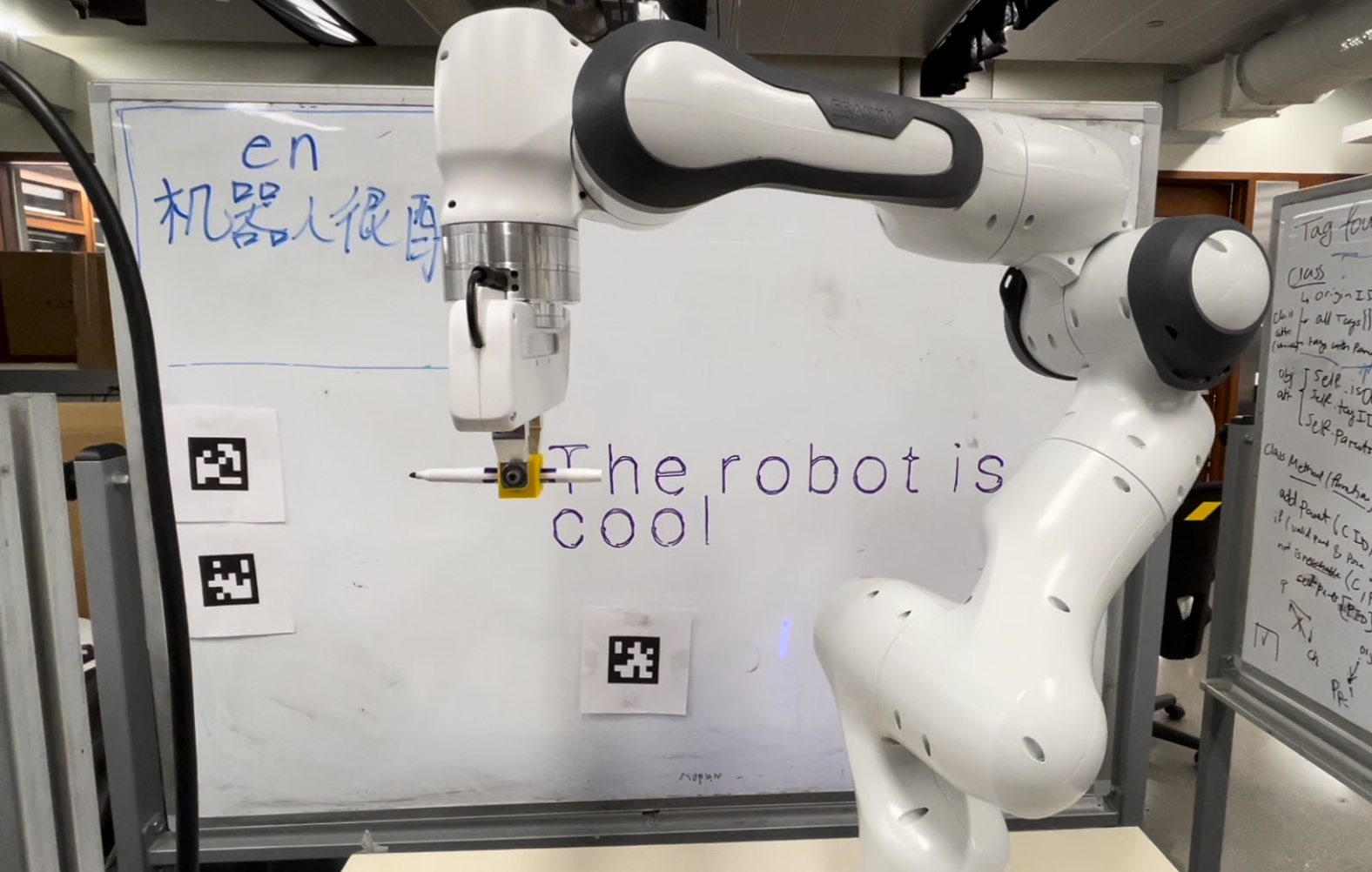
Developed a ROS2 package that allows a 7 DoF Franka Emika Panda robotic arm to write translated text and speech on a whiteboard.
Team: Allen Liu, Kassidy Shedd, Megan Black, Damien Koh
GitHub: https://github.com/ME495-EmbeddedSystems/final-project-dkoh555
My primary responsibilities for this project included:
- Creating the
apriltagsandspeechpackages - Working with the MoveIt2 package to help convert waypoints to movement
apriltags package
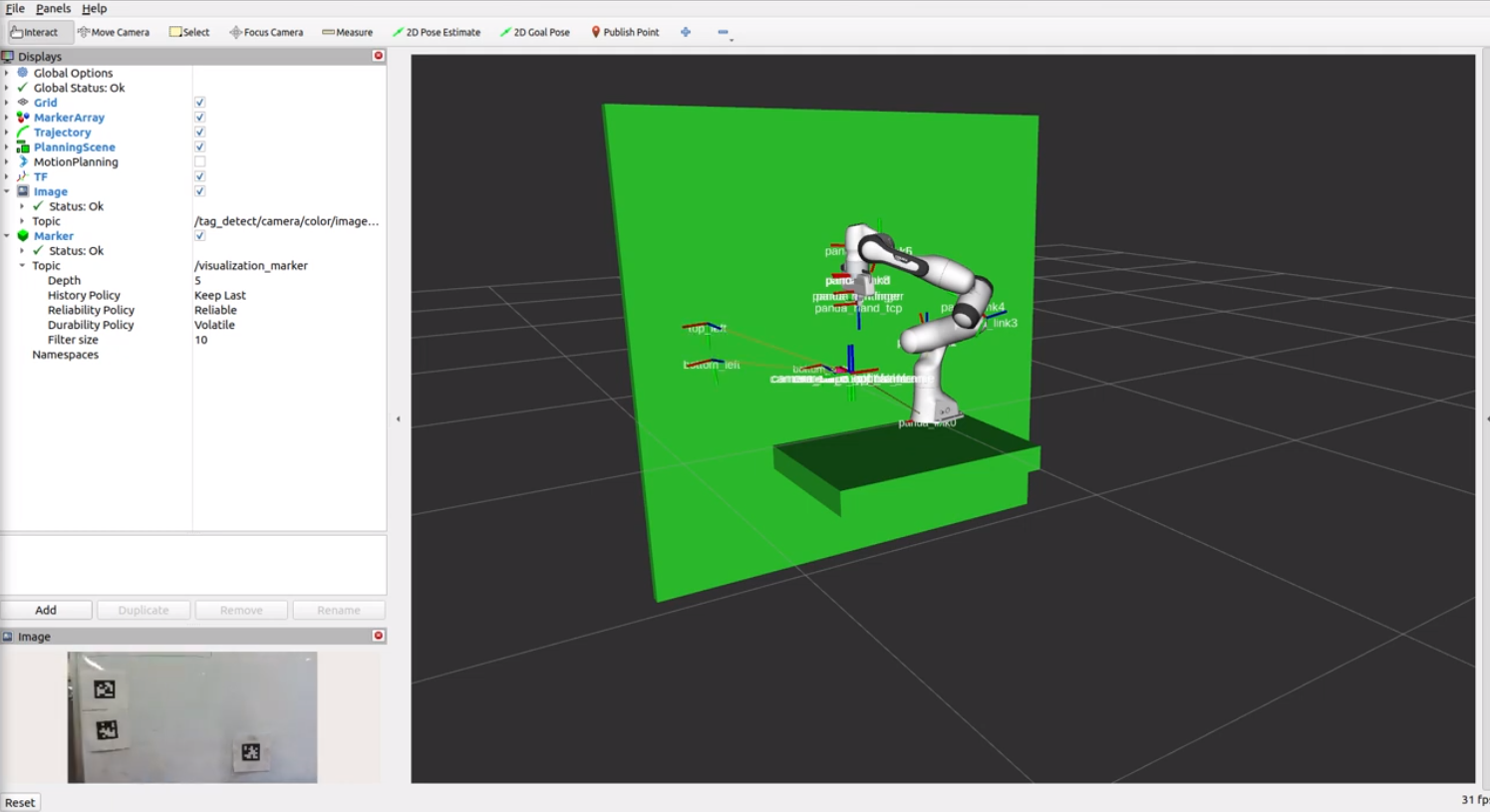
The purpose of this package is to localize the AprilTags on the whiteboard, transform their 3D-locations into the robot’s base frame (panda_link0), and publish these coordinates so they can be accessed by the node used for movement.
The GetAprilTags node in the package creates a static transformation that links the camera to robot base, looks up transforms between the tags and camera, constructs transformation matrices from Quaternions, extracts the coordinate values, and publishes them using a custom message type.
In the image below, the AprilTags have been localized and transformed into the robot’s frame.
speech package
The purpose of this package is to provide the speech-to-text functionality, as an alternative to the default text-to-text.
The node, ListenSpeech, is triggered by a service call. The package makes use of PyAudio and the speech_recognition library. By default, it translates the spoken language to English, but this can be changed with a different language code.
The service call activates the LISTENING state, which listens, then continues the node’s pipeline in the RECOGNIZING state.
1
2
3
4
5
6
7
if self.state == State.LISTENING:
with sr.Microphone(device_index=self.index) as source: # detects presence of external microphone
self.get_logger().info("Say something...")
self.recognizer.adjust_for_ambient_noise(source) # adjusts for ambient noise
self.audio = self.recognizer.listen(source) # by default, it listens until it detects a pause
self.state = State.RECOGNIZING
Waypoints to Movement
Each letter that the robot writes begins as a series of waypoints (2D-coordinates) that must be converted into physical movement by the robot arm. To do this, we created a custom move_robot Python API to plan and execute paths using the MoveIt2 MoveGroup and ExecuteTrajectory Action Clients, respectively. We make use of MoveIt2’s compute_cartesian_path service to follow a smooth and stable path.
See the move_robot API: move_robot
The API plans collision-free paths and allows the user to send the end-effector to a desired configuration with code as simple as:
1
2
3
4
5
6
7
8
self.comm_count = 0 # self.comm_count is incremented after each successful execution of a position command
self.pos_list = [
Point(x=0.2, y=0.4, z=0.2)] # desired location
self.ori_list = [
Quaternion(x=1.0, y=0.0, z=0.0, w=0.0)] # desired orientation
self.robot.find_and_execute(
point=self.pos_list[self.comm_count],
quat=self.ori_list[self.comm_count],)
How it Works:
- Calibrate
- The robot uses an Intel Realsense camera to acquire the location of three AprilTags, which, together, are used to constrain the plane of the whiteboard.
- The distance and orientation of the whiteboard is made public through a custom message type on a ROS2 topic.
- Using the known transformation between the camera link and the robot arm’s base link, the updated configuration (Pose) of the whiteboard is extrapolated into the frame of reference of the end-effector and is used to position the pen when writing.
- Detect Text
- By default, the robot then enters the “Detecting” state, in which it waits for a human to enter the frame and start writing on the whiteboard.
- Using the YOLOv8 deep learning model, the robot recognizes once a human has entered the frame and then left, after which the next step commences.
- The robot then uses the PaddleOCR library to detect the text written on the whiteboard and pass it along, without any processing, as a string. The desired language is written on the whiteboard as a short language code above the unknown word(s) (e.g. “en” for English).
- Alternatively, instead of writing a word on the whiteboard, the user could call the speech service which activates the microphone as an input. The user then simply speaks out loud, and their word(s) are passed along as a string from there. By default, the desired language for speech is set to English.
- Translate Text
- The next stage in the pipeline is the translator node which takes in both the desired language and the string of the unknown word(s).
- The translation node uses the Google Translate API and can translate to and from 50+ languages.
- This step outputs a fully-translated string of text.
- Text to Waypoints
- The string2waypoints node uses matplotlib to convert each character to a series of waypoints–passed along as a series of Point messages–which can then be followed by the robot arm.
- Waypoints to Movement
- Finally, the robot uses the write_letters package to convert the waypoints to movement and draw the letters on the board.
- This package makes use of our custom move_robot Python API to plan and execute robot arm paths using the MoveIt2 MoveGroup and ExecuteTrajectory Action Clients, respectively.
- We make use of MoveIt2’s compute_cartesian_path service so as to follow a more direct and stable path when writing the letters, as opposed to compute_ik.