Extended Kalman Filter SLAM from Scratch
C++, ROS2, Unit Testing, CMake
Overview
I implemented an Extended Kalman filter (EKF) SLAM algorithm from scratch through several ROS2 packages and a custom C++ library.
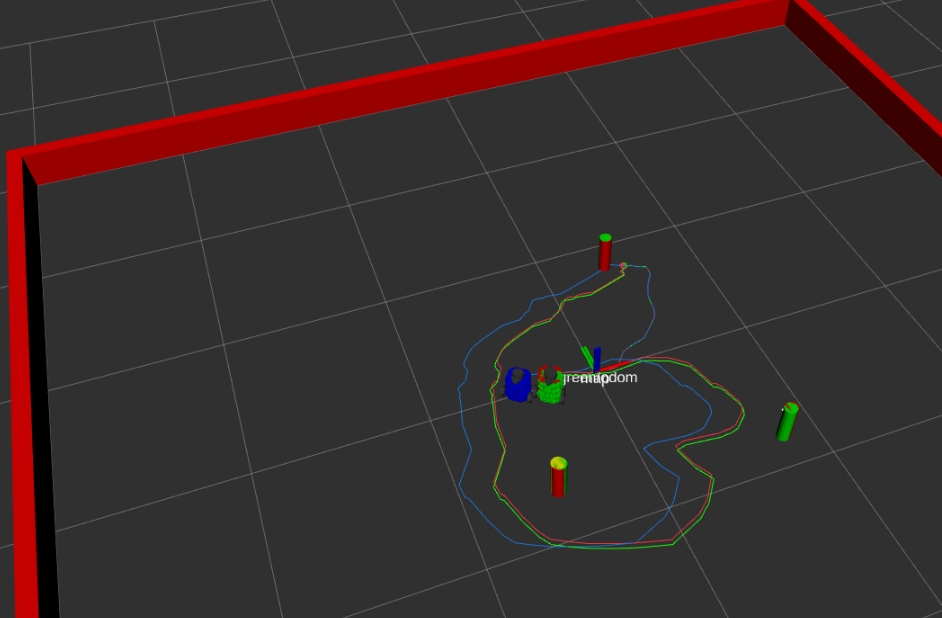
In the above image, there are three simulated turtlebots. The red turtlebot represents the ground truth, the blue is the odometry estimate, and the green is the estimate with SLAM. As can be seen, the estimate with SLAM performs much better than the estimate with just odometry.
GitHub: https://github.com/ME495-Navigation/slam-project-henryburon
turtlelib is a C++ library for handling SE(2) math and other turtlebot-related calculations.
nusim is a ROS2 package that provides a simulated environment for the robots.
nuturtle_description is a ROS2 package that dispalys turtlebot3 models in RViz.
nuturtle_control controls the robot in simulation and the physical world.
nuslam implements EKF SLAM to estimate the robot’s pose.
Implementation Details
turtlelib
Designed to facilitate geometric computations and two-dimensional rigid body transformations. Provided functionalities include:
- Point, vector, and twist manipulation
- SVG-based visualization
- Operator overloading
All functions are tested using the Catch2 unit test framework.
nusim
ROS2 C++ node that provides a simulated environment for the robot. Launches RViz and displays walls, obstacles, and a single red robot. User can configure launch parameters in basic_world.yaml.
nuturtle_description
Builds turtlebot models with imported meshes in URDF; displays in RViz. Option to display all four models, or just one.
nuturtle_control
Computes and publishes the odometry the turtlebot based on the joint states of its wheels. Controls movement of the turtlebot robot based on velocity commands and sensor data from the robot’s wheel encoders.
nuslam
Implements EKF SLAM for the turtlebot, a differential-drive robot. The node estimates the robot’s pose and the positions of obstacles in the environment by combining odometry data from the robot’s wheel encoders with simulated sensor data from obstacles in the environment.
The estimates odometry, path, and obstacles are published for visualization.